19. How I Did It
Solution to Undistort and Transform quiz:
That was a tricky quiz!
Let's take a closer look at the pieces involved. These steps will all be useful when you get to the project at the end of this section.
First off, we defined a function for you,
corners_unwarp()
. The function accepts an image and our previously calculated values for the camera matrix,
mtx
, and distortion coefficients,
dist
.
Then you had to implement the function.
Here's how I implemented mine:
# Define a function that takes an image, number of x and y points,
# camera matrix and distortion coefficients
def corners_unwarp(img, nx, ny, mtx, dist):
# Use the OpenCV undistort() function to remove distortion
undist = cv2.undistort(img, mtx, dist, None, mtx)
# Convert undistorted image to grayscale
gray = cv2.cvtColor(undist, cv2.COLOR_BGR2GRAY)
# Search for corners in the grayscaled image
ret, corners = cv2.findChessboardCorners(gray, (nx, ny), None)
if ret == True:
# If we found corners, draw them! (just for fun)
cv2.drawChessboardCorners(undist, (nx, ny), corners, ret)
# Choose offset from image corners to plot detected corners
# This should be chosen to present the result at the proper aspect ratio
# My choice of 100 pixels is not exact, but close enough for our purpose here
offset = 100 # offset for dst points
# Grab the image shape
img_size = (gray.shape[1], gray.shape[0])
# For source points I'm grabbing the outer four detected corners
src = np.float32([corners[0], corners[nx-1], corners[-1], corners[-nx]])
# For destination points, I'm arbitrarily choosing some points to be
# a nice fit for displaying our warped result
# again, not exact, but close enough for our purposes
dst = np.float32([[offset, offset], [img_size[0]-offset, offset],
[img_size[0]-offset, img_size[1]-offset],
[offset, img_size[1]-offset]])
# Given src and dst points, calculate the perspective transform matrix
M = cv2.getPerspectiveTransform(src, dst)
# Warp the image using OpenCV warpPerspective()
warped = cv2.warpPerspective(undist, M, img_size)
# Return the resulting image and matrix
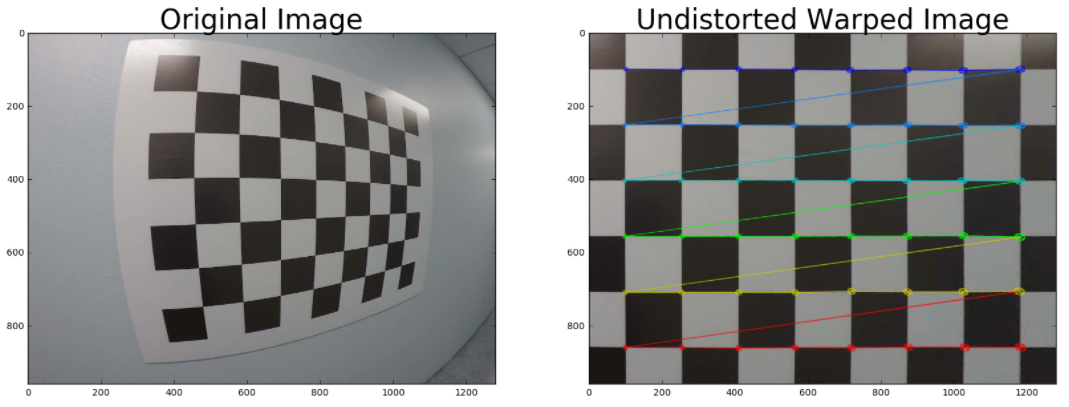
return warped, MOutput
Here's the output you needed to achieve: